|
Touch panel interface
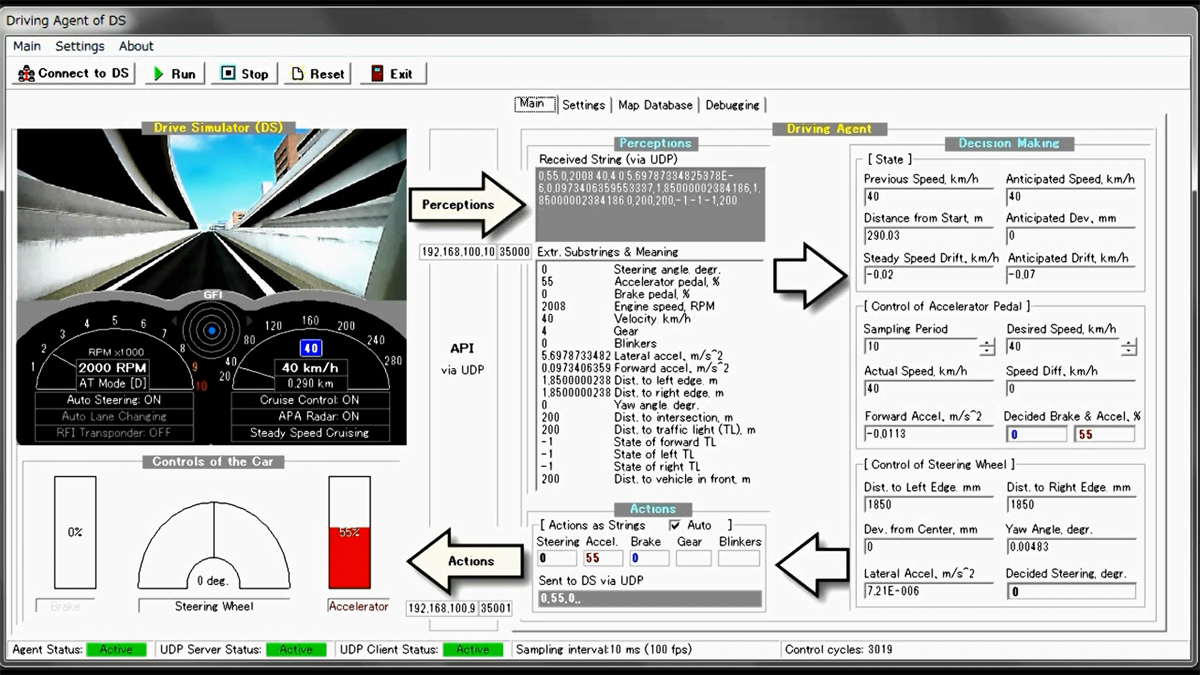
An interface between the human driver and the auto pilot in the fully-fledged Forum 8 drive simulator.
|
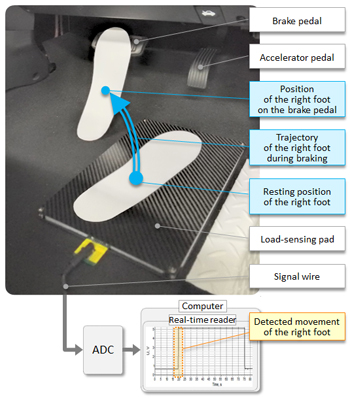
Load-sensing pad
Used by the emergency brake assistance system to sense the onset of movement of the driver's foot towards the brake pedal during automated driving.
|
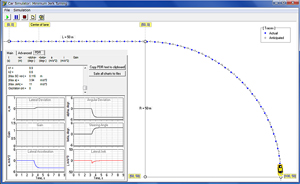
Optical tracker of the moving driver's foot
Used by the emergency brake assistance system to sense the movement of the driver's foot towards the brake pedal during automated driving.
|
|
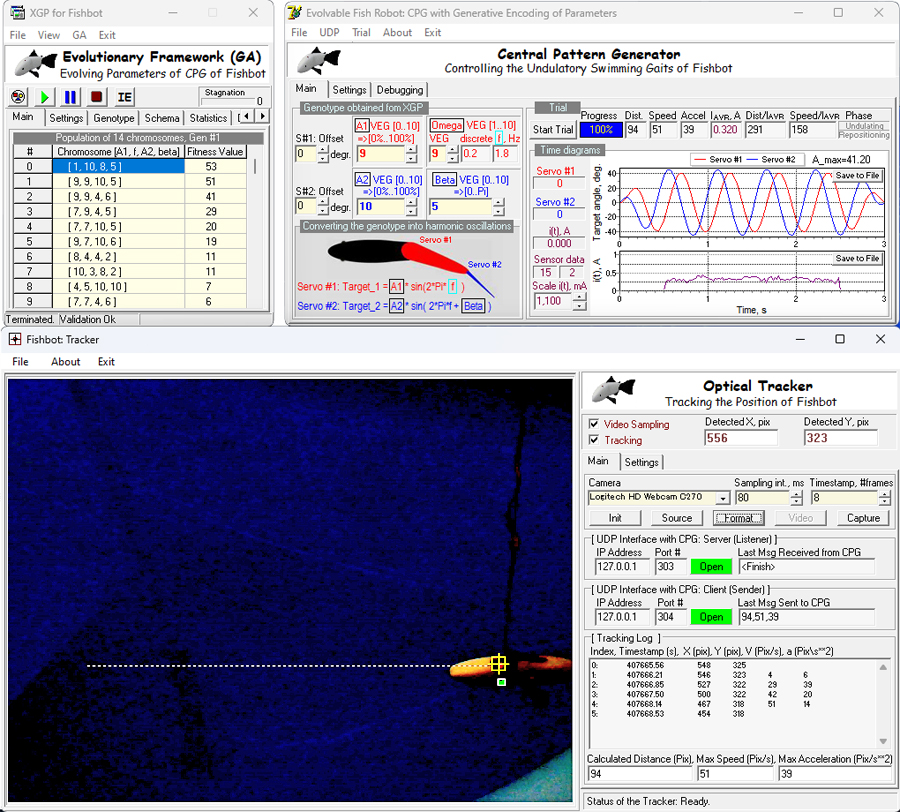
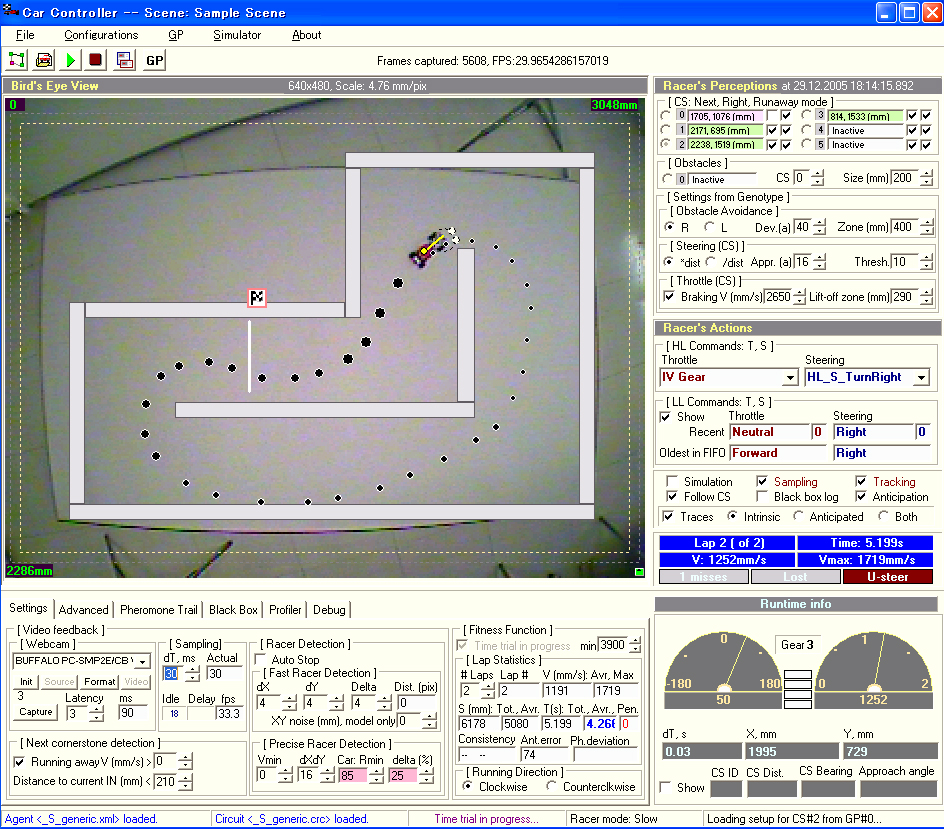
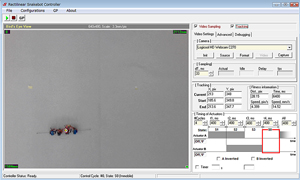
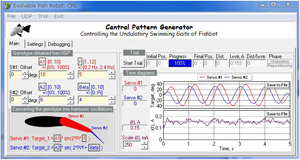
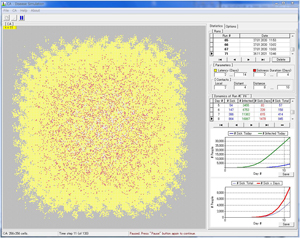
Real-time tracker of the location of the Fishbot
Used to evaluate the fitness value (e.g., speed, acceleration, or energy efficiency) of the evolved undulatory swimming gaits of the bot.
|
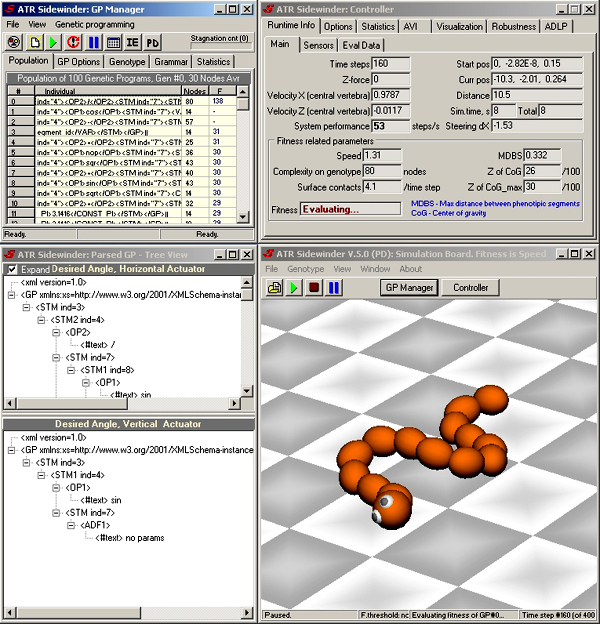
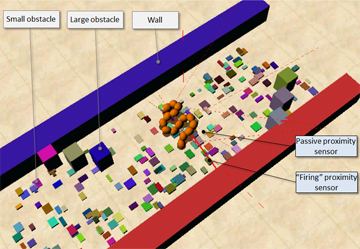
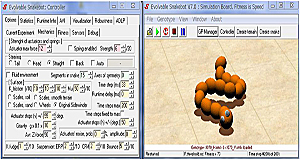
Active sensing by simulated sidewinding snake robot
The active sensing (via proximity sensors attached to each of the segments of the bot)
is coevolved with the locomotion (by genetic programming) to facilitate the navigation of the bot in challenging environments.
|
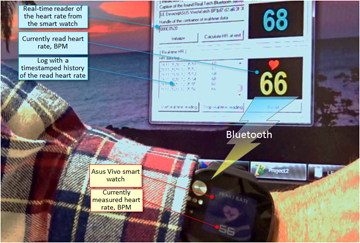
Real-time reader of the heart rate
Implemented as a subsystem that monitors the stress level of the human drivers
in both automated- and manual driving of a car in a drive simulator.
|