主な貢献の概要
|
|
<< Back to the main page of Ivan Tanev
自動運転、進化的ロボット工学、進化的方法論 (遺伝的プログラミング、遺伝的アルゴリズムなど)、エージェント
|
|
|
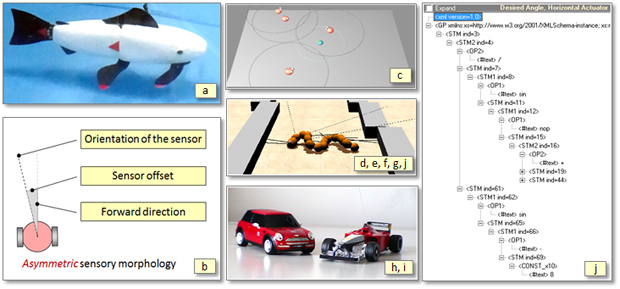
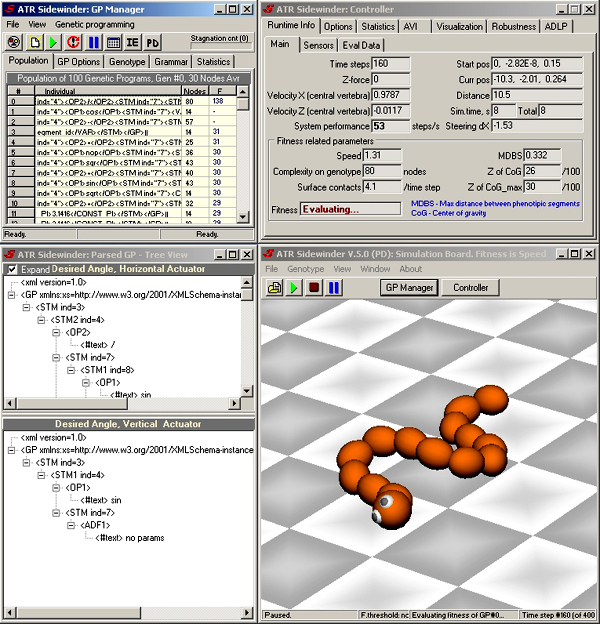
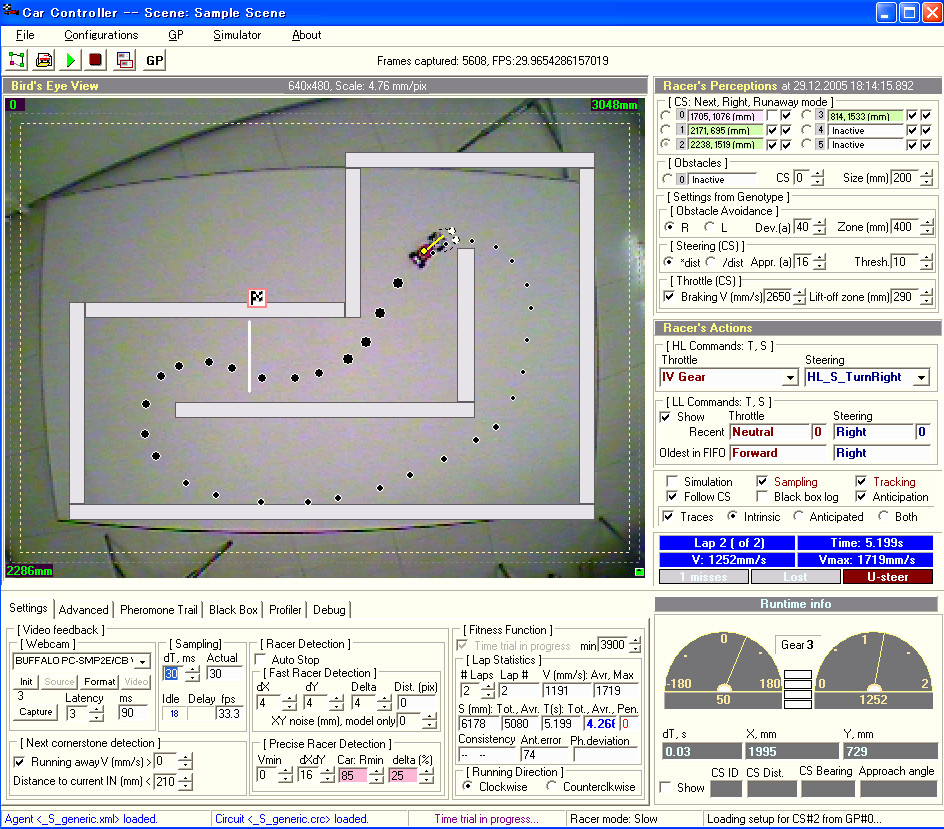
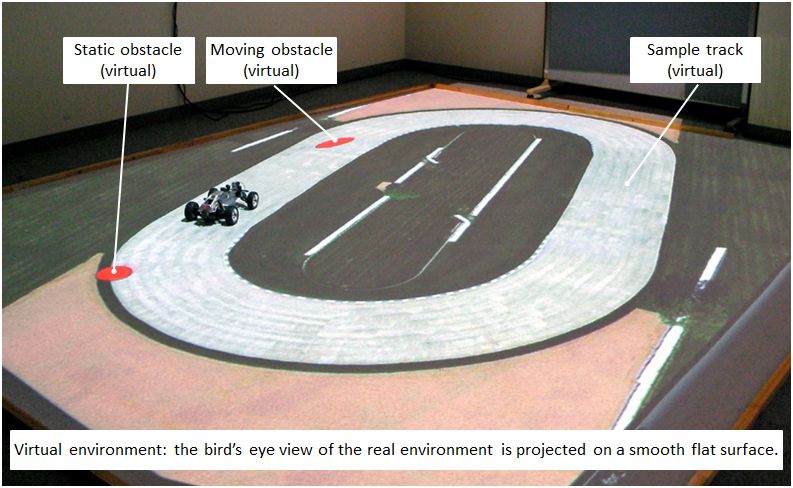
研究史:ガラガラヘビロボット、RC車の自動運転
キーワード:横方向の移動 (sidewinding locomotion)、非ランダム突然変 (non-random mutations)、エピゲネティック・プログラッミング (epigenetic programming)、
インテラクティブな進化 (interactive evolution)、漸進的な進化 (incremental evolution)、先見的な制御 (anticipatory control)
プラットホーム:OpenGL、 Open Dynamics Engine (ODE)、
XML-based Genetic Programming Framework (XML) 、RC車
|
|
|
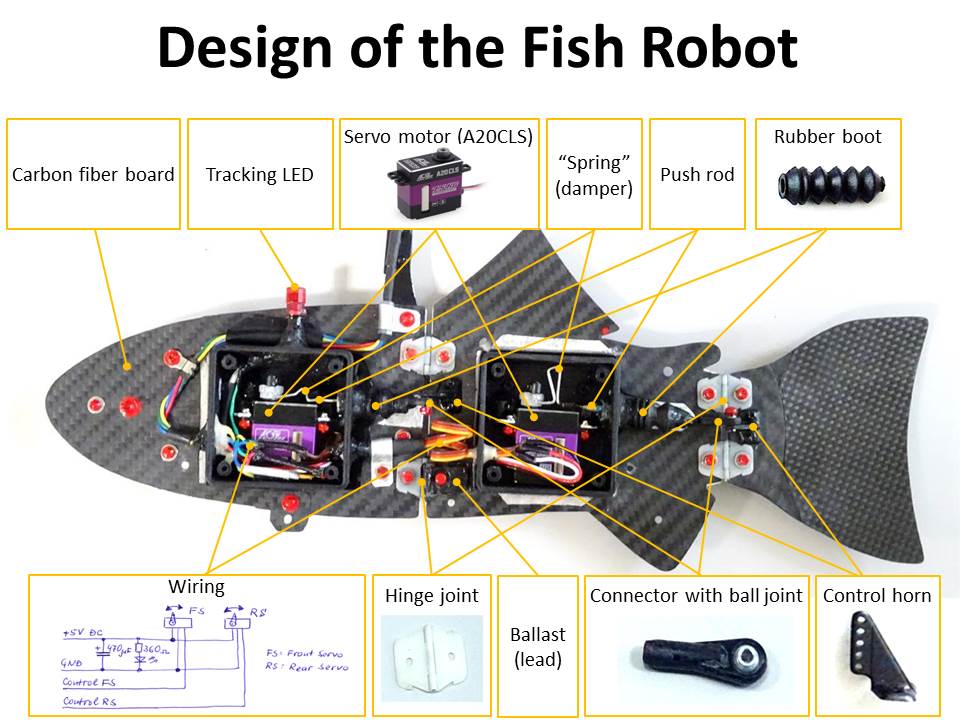
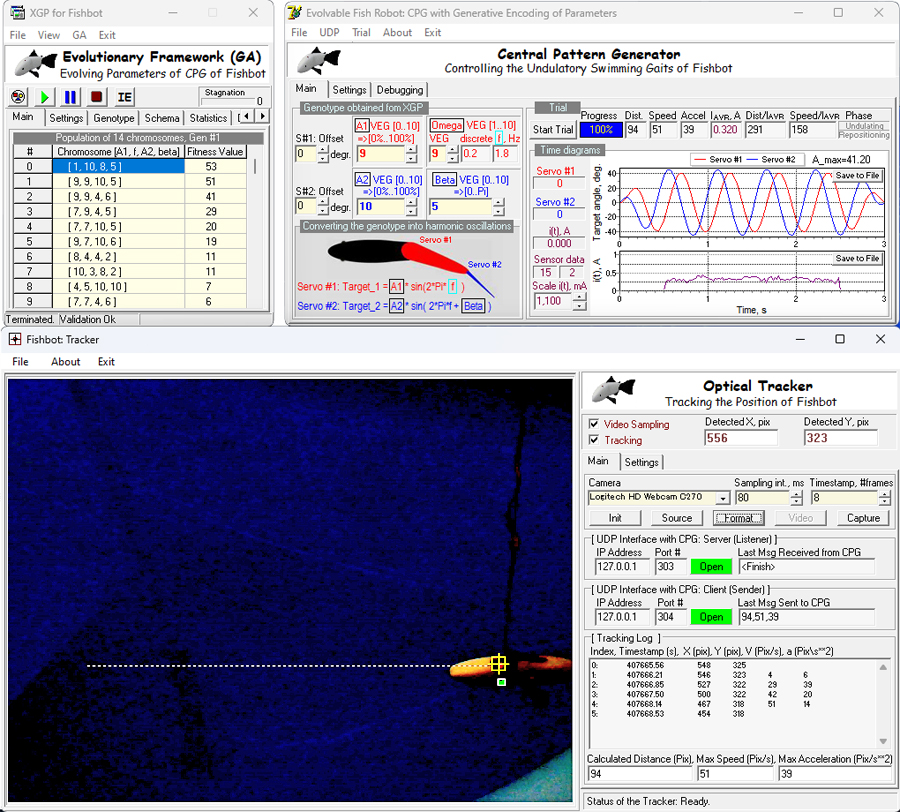
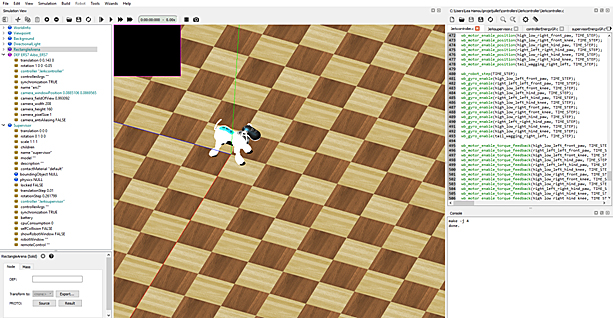
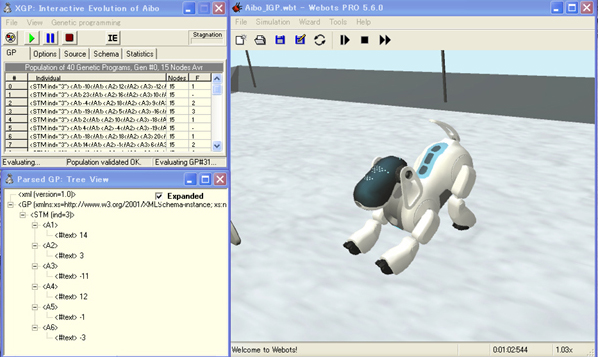
進化的ロボット工学:エージェント、ロボット
キーワード:魚ロボット、犬ロボット、ヘビロボットなど、自動車などの設計、最適化、および制御のための進化的計算
プラットホーム:魚ロボット、 Webots,
Open Dynamics Engine (ODE),
OpenGL,
XML-based Genetic Programming Framework (XML)
|
|
|

|
|
エージェントとしての人間のドライバー:先進運転支援システム (Advanced Driver-assisting Systems, ADAS)
キーワード:滑り防止装置 (Electronic Stability Control, ESC), アダプティブ・クルーズ・コントロール (Adaptive Cruise Control, ACC),
レーン・キープ・アシスト (Lane Keeping Assistant, LKA), レーン・チェンジ・アシスト (Lane Changing Assistant, LCA).
プラットホーム:
ドライブシミュレーター,
The Open Racing Car Simulator (TORCS)

|

|
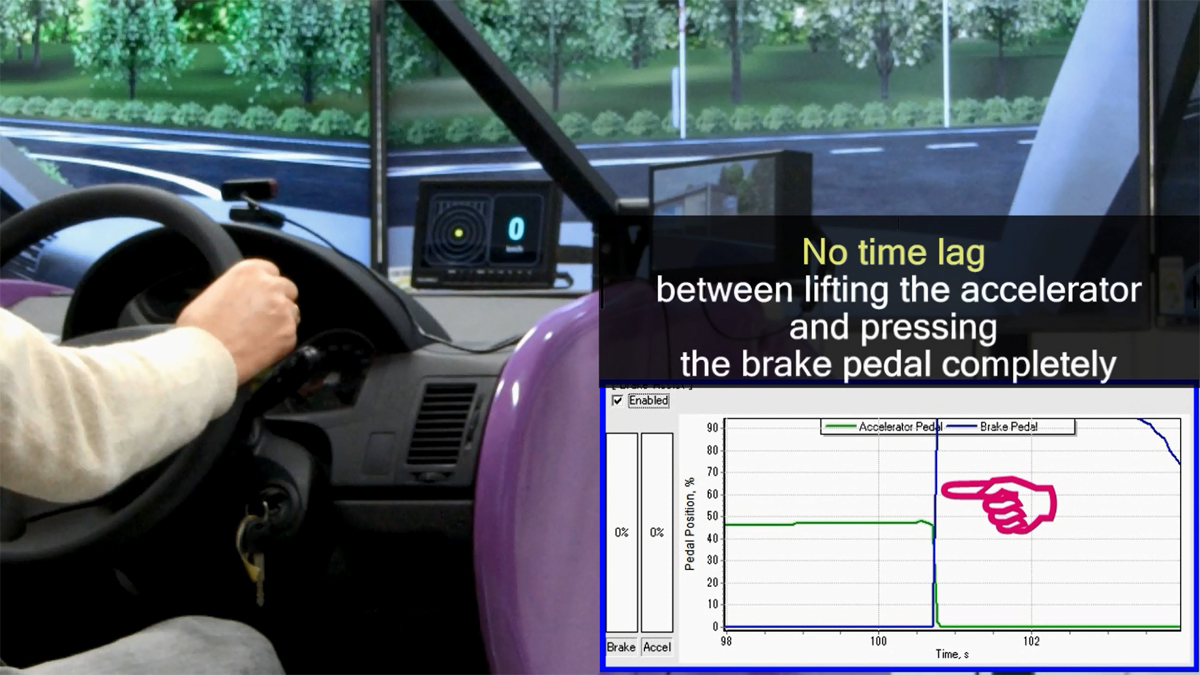
エージェントとしての人間のドライバー:先進運転支援システム (Advanced Driver-assisting Systems, ADAS)
キーワード:急ブレーキアシスト (Emergency Brake Assist, EBA)、機械学習 (machine learning)
プラットホーム: ドライブシミュレーター
|
|
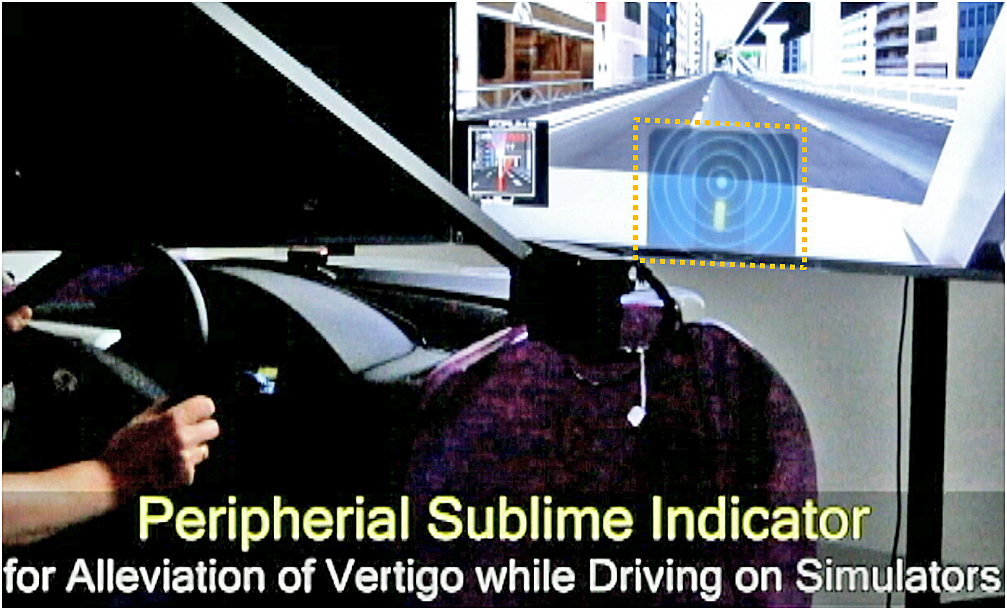
エージェントとしての人間ドライバー: ヒュマンファクタ (human factors)
キーワード:自動運転における引き継ぎリクエスト (take-over request in automated drivng)、ヒュマンマシンインターフェース (human-machine interface, HMI)、驚愕効果 (startle effect)、
自動驚愕効果 (automation startle)、自動化の驚き (automation surprise), ちらつきめまい (flicker vertigo)、リスクホメオスタシス (risk homeostasis)、認知過負荷 (cognitive overload)、ストレス (stress)、コモンズの悲劇 (tragedy of the commons)
プラットホーム: ドライブシミュレーター,
実車

|
|
|

|

|

|
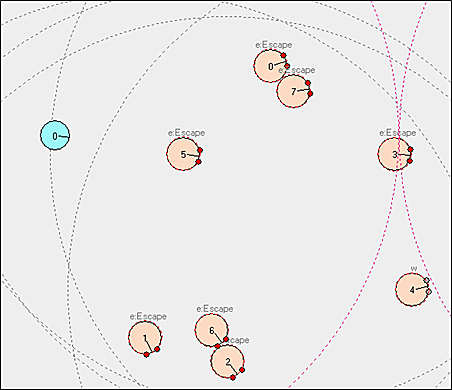
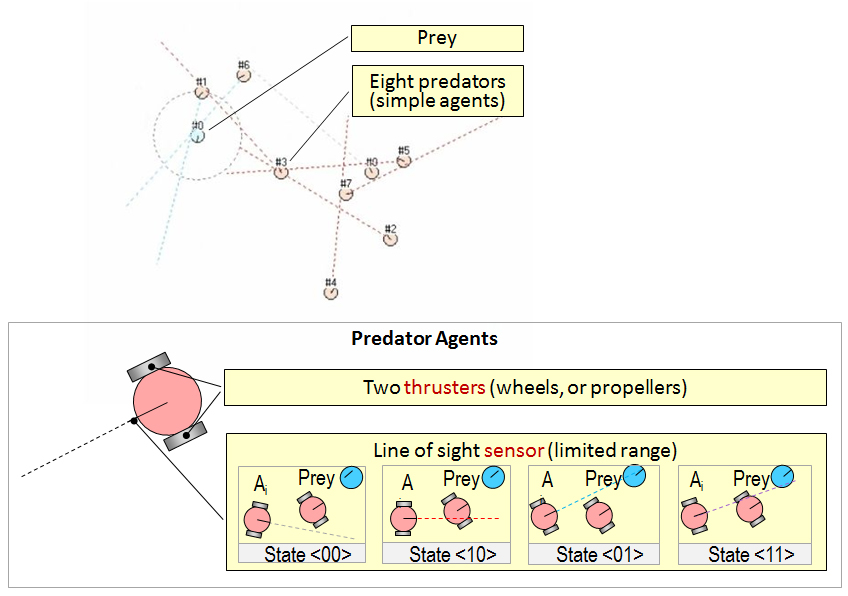
敵対的なマルチエージェントシステムにおける進化的計算
キーワード:マイクロおよびナノロボット、オオカミ-カリブー問題 (wolf-caribou problem)、捕食者-被食者問題 (predator-prey pursuit problem)
プラットホーム: XML-based Genetic Programming Framework (XML)
|
|
...and more...

|

|
<< Back to the main page of Ivan Tanev