[ Snapshots ]
Movies >>
| Biological Inspiration: Sidewinder (Crotalus Cerastes), reaching a top speed of about 5 km/h. The fastest snake on Earth is the Black Mamba (Dendroaspis Polylepis), with a top speed of 16 km/h in short bursts over level ground. The photographs below depict a living Sidewinder at the Lausanne Vivarium, Switzerland (left) and a plastic model, exhibited at the Field Museum of Natural History, Chicago, USA (right). |


|
| Video (@YouTube): Evolution, Robustness and Adaptation of Locomotion Gaits of Realistically Simulated Sidewinding Snake-like Robot (Sidewinder Snakebot). |
|
|
|
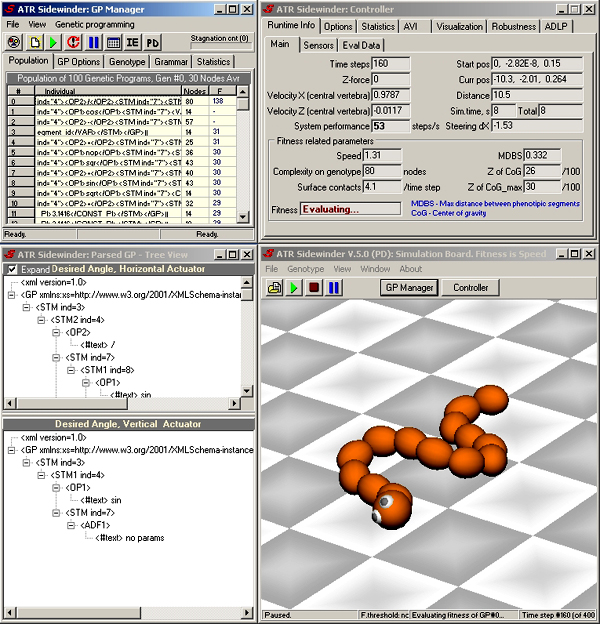
The software applied for the evolution of locomotion gaits of the simulated sidewinder Snakebot:
XML-based genetic programming framework (XGP) |
|
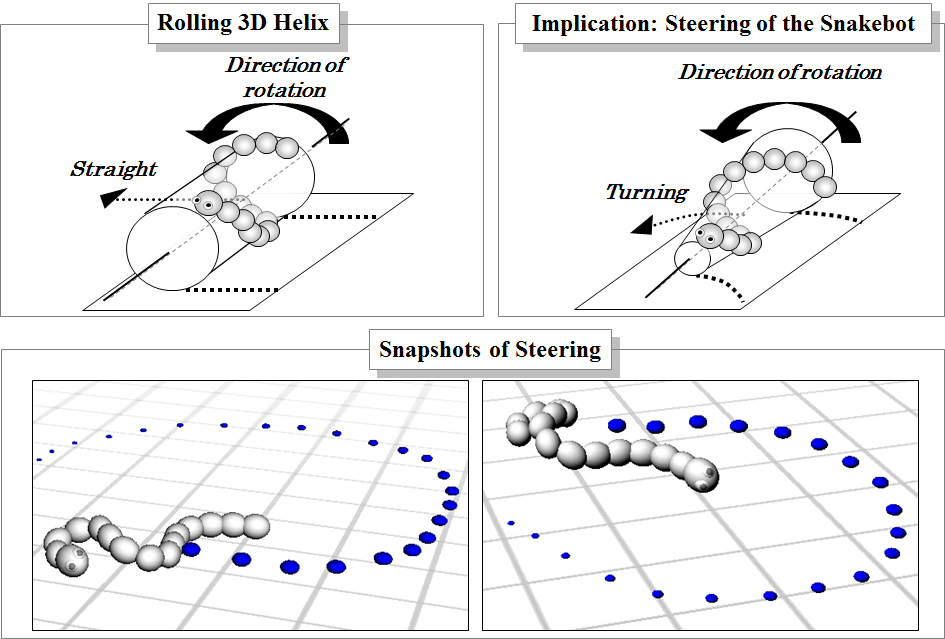
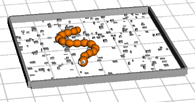
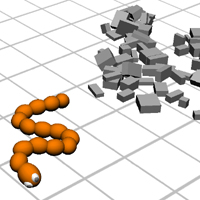
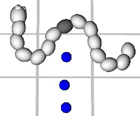
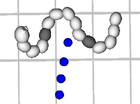
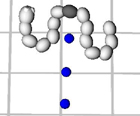
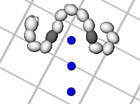
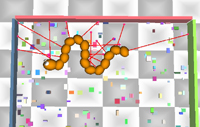
| Sample evolved best-of-run locomotion gaits. Fitness is the velocity of locomotion. The blue trailing circles depict the trajectory of the center of the mass of Snakebot. Timestamp interval between each of these circles is fixed and it is the same (10 time steps, or 0.5s of real time) for each snapshot. The distance between these circles comparatively illustrates the achieved velocity in each of these eight cases. |






|
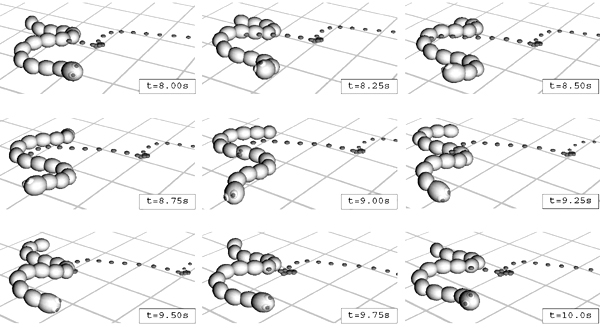
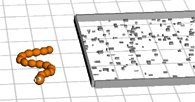
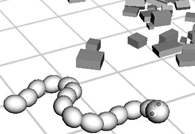
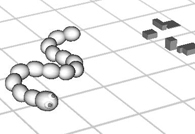
| Sample evolved on smooth terrain best-of-run locomotion gait. The dark trailing circles depict the trajectory of the central segment of Snakebot. Timestamp interval between each of these circles is 2 time steps (0.1s of real time). |
|
| The evolved sidewinding locomotion can be seen as a rolling cylinder with the snakebot helically wrapped around it. This could be seen as an invention of the wheel by the sidewinder. Steering of the sidewinding bot is one of the possible engineering implications of this finding. |
|
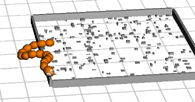
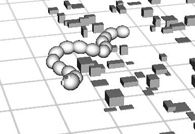
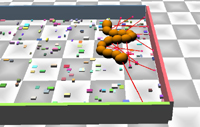
| Sample evolved on challenging terrain best-of-run locomotion gait: initial (left), intermediate (middle) and final (right) stages of the trial. |

|
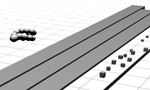
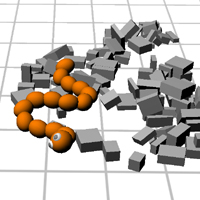
| Robustness of sample best-of-run locomotion gait. Clearing a pen: initial (left), intermediate (middle) and final (right) stages of the trial. |
|
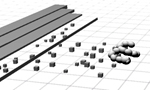
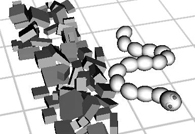
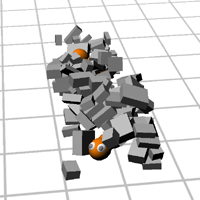
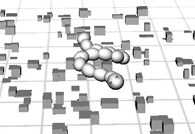
| Robustness of sample best-of-run locomotion gait. Clearing a pile of boxes: initial (left), intermediate (middle) and final (right) stages of the trial. |
|
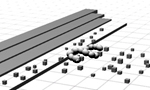
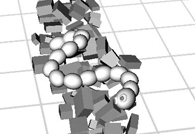
| Robustness of sample best-of-run locomotion gait. Emerging from burial under a stack of boxes: initial (left), intermediate (middle) and final (right) stages of the trial. |
|
| Robustness of sample best-of-run locomotion gait in rugged terrain area: initial (left), intermediate (middle) and final (right) stages of the trial. |
|
| Adaptation of sample best-of-run locomotion gait to partial damage: damage of one and two segments before (left two snapshots) and after the adaptation (right two images). |
|
| Sensing the environment using simulated laser range finders. Snapshots show the same situation viewed from three different angles |

|
>> Back to the main page of Ivan Tanev